
Paralel Yönlendirme Mekanizması:
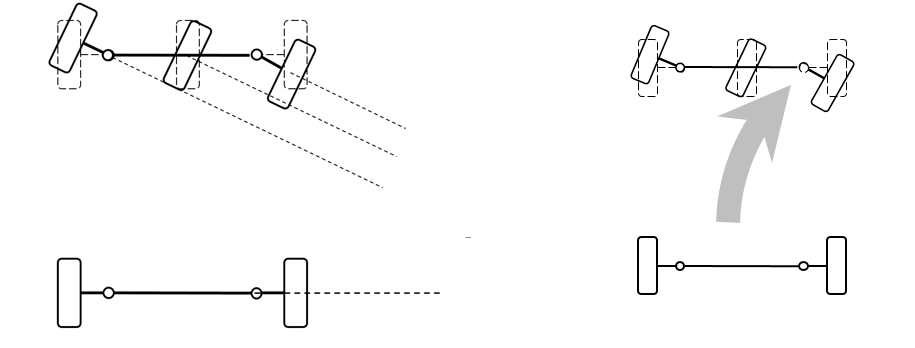
Benz Patent-Motorwagen üç tekerlekliydi ve önde tek bir tekerlek ve aracı yönlendirmek için bir yeke vardı. Ancak daha öncesinde 4 tekerlekli at arabaları için öndeki sabit aksın sağa sola dönmesinden ibaret bir sistem kullanılıyordu. Bu sistemde ön iki teker birbirine paralel idi. Düşük hızlarda sorunsuz olarak çalışabiliyordu.
Ackerman Yönlendirme Mekanizması:
Ancak daha yüksek hızlarda bu sistemin mükemmel olmadığı anlaşıldı. Erasmus Darwin’in mucit olarak daha önce 1758’den kalma bir iddiası olabilir. Darwin, direksiyon sistemini atlı arabaların devrilmesi sonucu yaralandığı için tasarladı. Resmi kayıtlara göre içerdeki tekerin dışardaki tekere göre daha fazla dönmesini öngören sistem Alman araba üreticisi Georg Lankensperger tarafından 1817’de Münih’te icat edildi, daha sonra İngiltere’deki temsilcisi Rudolph Ackermann (1764-1834) tarafından at arabaları için 1818’de patentlendi.
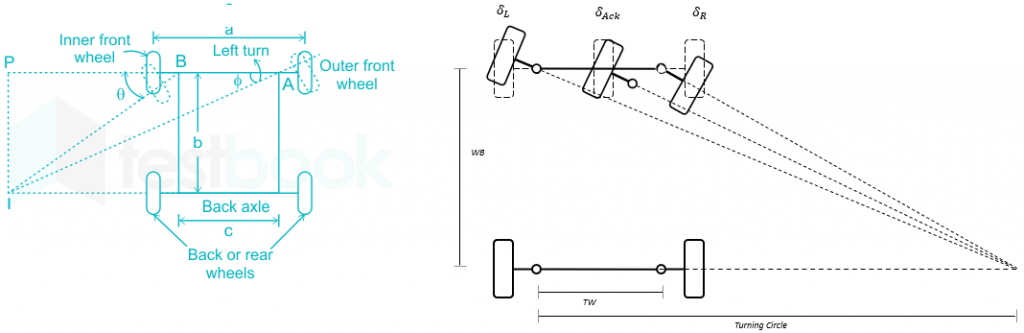
Ackermann geometrisinin amacı, bir virajın etrafındaki yolu takip ederken lastiklerin yana doğru kayma ihtiyacını ortadan kaldırmaktır.Bunun geometrik çözümü, tüm tekerleklerin akslarının ortak bir merkez noktasına sahip daire yarıçapları olarak düzenlenmesidir. Arka tekerlekler sabit olduğu için bu merkez noktası arka dingilden uzanan bir çizgi üzerinde olmalıdır.
Ackermann’da direksiyon dişlisi mekanizması ön tekerlek aksının arkasına yerleştirilmiştir. Dönen bir çift parçadan ibarettir.
Ackermann yönlendirme’in avantajları şunlardır:
Döner çiftleri sayesinde çalışması için daha az çaba gerektirir. Daha az aşınma ve yıpranma sorunu yaşar. Davis direksiyon dişlisi mekanizmasından daha az alana ihtiyaç duyar. Üretimi ekonomiktir.
Ackermann yönlendirme sisteminin dezavantajı, orta ve iki uç konumda doğru temel denklemini yerine getirmesidir, diğer noktalarda tam doğru açıda değildir. Ackermann’da savrulma yüksektir.
Modern otomobiller, kısmen önemli dinamik ve uyumlu etkileri göz ardı ettiği için saf Ackermann direksiyonunu kullanmaz, ancak ilke düşük hızlı manevralar için sağlamdır. Bazı yarış arabaları, yüksek hızda viraj alırken iç ve dış ön lastikler arasındaki kayma açısındaki büyük farkı telafi etmek için ters Ackermann geometrisi kullanır. Bu tür geometrinin kullanılması, yüksek hızlı viraj alma sırasında lastik sıcaklıklarının düşürülmesine yardımcı olur, ancak düşük hızlı manevralarda performansı tehlikeye atar.
Davis Yönlendirme Mekanizması:
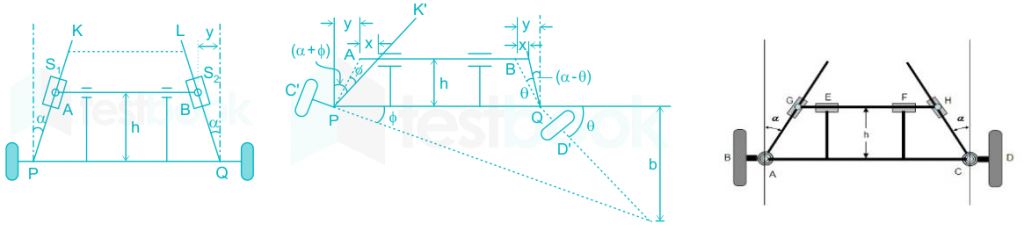
Davis Direksiyon, direksiyonda sadece kayan çiftlerden oluşan mekanizmalardan biridir, bu, mekanizmadaki çiftlerin aracı yönlendirirken kayacağı anlamına gelir. Bu mekanizmanın temel denklemi her pozisyonda sağlanır. Bu mekanizmada anlık nokta veya merkez, dingil mesafesinin merkezinde elde edilir. Bu nedenle, her noktada geçerlidir.
Davis direksiyon dişlisi mekanizması ön tekerlek aksının önüne yerleştirilmiştir. Davis direksiyon dişlisi mekanizmasında hem döner hem de kayar çift ile mevcuttur.
Davis Direksiyon Mekanizmasının avantajları şunlardır:
Birkaç dönüşe bağlı kalmak yerine tüm konumlarda ve dönüşlerde temel denklemi karşılar.
Davis Steering’in tam bir direksiyon mekanizması olduğunu söyleyebiliriz.
Dönerken sürücünün tüm gücü tekerleklere dönüştürülür.
Davis Direksiyonda mekanizma kayar tip olduğu için aracı döndürmek için daha fazla efor sarf etmemiz gerekiyor. Daha fazla aşınma ve yıpranma söz konusudur. Davis direksiyon dişlisi mekanizması, Ackermann’dan daha geniş alan gerektirir. Mekanizma daha çok bakım gerektirir.
Günümüzde takip edilen tüm direksiyon türleri Davis ve Ackermann Direksiyonuna dayanmaktadır.