
Bisikletler, motosiklet, sccoter gibi tek izli araçlar sabitken yanal stabiliteden yoksundur ve çoğu durumda yalnızca ileri doğru hareket ederken dik kalabilirler. Dengede tutmak için gereken direksiyon genellikle bir sürücü tarafından veya belirli durumlarda bisikletin kendisi tarafından sağlanır. Geometri, kütle dağılımı ve jiroskopik etki dahil olmak üzere çeşitli faktörlerin tümü, bu kendi kendine kararlılığa değişen derecelerde katkıda bulunur.
Yeni başlayan binicilerin birincil amacı dik durmak olsa da, bir dönüşte dengeyi korumak için bir bisikletin yana eğilmesi gerekir: hız ne kadar yüksek veya dönüş yarıçapı ne kadar küçükse, o kadar fazla yatış gerekir. Bu eğilme genellikle ters yönde bir anlık direksiyon ile üretilir, buna kontra direksiyon denir. Kontra direksiyon becerisi genellikle motor öğrenme ile kazanılır ve bilinçli düşünceden ziyade prosedürel hafıza yoluyla yürütülür. Diğer tekerlekli araçlardan farklı olarak, bisikletlerdeki birincil kontrol girdisi direksiyonun yönü değil, sebep olduğu tork dur.
Sürüş esnasında maruz kalınan kuvvetler
Tüm kütlelerde olduğu gibi, yerçekimi sürücüyü ve tüm bisiklet bileşenlerini dünyaya doğru çeker. Her bir lastik temas alanında hem yatay hem de dikey bileşenlere sahip yer reaksiyon kuvvetleri vardır. Dikey bileşenler çoğunlukla yerçekimi kuvvetine karşı koyar, ancak aynı zamanda frenleme ve hızlanma ile de değişir. Yuvarlanma direnci de dahil olmak üzere tekerlekler ve zemin arasındaki sürtünmeden kaynaklanan yatay bileşenler, itici kuvvetlere, fren kuvvetlerine ve dönüş kuvvetlerine tepki verir. Atmosferden kaynaklanan aerodinamik kuvvetler çoğunlukla sürtünme şeklindedir, ancak yan rüzgarlardan da olabilir.
Sadece hareket yönünü değiştirmeye ek olarak, dengeleme için manevralar sırasında dönüş kuvvetleri üretilir. Bunlar, bisikletin ve sürücünün hızlanan referans çerçevesindeki merkezkaç kuvvetleri olarak yorumlanabilir; veya basitçe durağan, eylemsiz bir referans çerçevesindeki atalet. Tekerlekler, motor, şanzıman vb. gibi dönen parçalara etkiyen jiroskopik kuvvetler de bu dönen parçaların ataletinden kaynaklanmaktadır
Sürücüden ve bileşenler arasındaki etkileşimden kaynaklanan kuvvetler
Pedal çevirmeye ek olarak, sürücü direksiyon mekanizması (ön çatal, gidon, ön tekerlek vb.) ile arka çerçeve arasında ve sürücü ile arka çerçeve arasında tork uygulayabilir. Birbirine karşı hareket eden parçalar arasında sürtünme vardır: aktarma organlarında, direksiyon mekanizması ve arka çerçeve arasında vb. Dönen tekerlekler ve dönmeyen çerçeve parçaları arasında sürtünme yaratan frenlere ek olarak, birçok bisiklette ön ve arka süspansiyonlar bulunur. Bazı motosikletler ve bisikletler, istenmeyen kinetik enerjiyi dağıtmak için bir direksiyon amortisörüne sahiptir, ve bazı bisikletlerde, bisikleti dümdüz ileri yönlendirme eğiliminde olan ilerici bir tork sağlamak için ön çatalı çerçeveye bağlayan bir yay bulunur. Arka süspansiyonlu bisikletlerde, aktarma organları ve süspansiyon arasındaki geri bildirim de ayrı bir unsurdur.
Yanal ile uzunlamasına ( dikey ) hareketler
Bir bisikletin hareketleri kabaca merkezi simetri düzlemi dışındaki: yanal; ve merkezi simetri düzleminde olanlar: uzunlamasına veya dikey hareketler olarak gruplandırılabilir. Yanal hareketler arasında dengeleme, eğilme, yönlendirme ve dönüş yer alır. Merkezi simetri düzlemindeki hareketler, ileriye doğru yuvarlanmayı, ancak aynı zamanda durmaları, tekerlekleri, fren dalışını ve çoğu süspansiyon aktivasyonunu içerir.
Bu iki tip hareketlerden, yanal dinamikler daha karmaşıktır ve analiz etmek için en az iki genelleştirilmiş koordinatla üç boyutlu, çok gövdeli dinamik analiz gerektirir.
Denge: Tekerlekleri kütle merkezinin altında tutarak bisikleti dengelemek / “stabilite”, “kendi kendine stabilite” ve “kontrol edilebilirlik”.
Bir bisiklet, zemin reaksiyon kuvvetleri, deneyimlediği diğer tüm iç ve dış kuvvetleri tam olarak dengeleyecek şekilde yönlendirildiğinde dik durur, örneğin
eğiliyorsa yerçekimi, dönüyorsa atalet veya merkezkaç, yönlendiriliyorsa jiroskopik, ve yan rüzgarda ise aerodinamik.
Direksiyon, bir sürücü veya belirli koşullar altında bisikletin kendisi tarafından sağlanabilir.[31] Bu kendi kendine stabilite, bisikletin geometrisine, kütle dağılımına ve ileri hızına bağlı olan çeşitli etkilerin bir kombinasyonu ile üretilir. Lastikler, süspansiyon, direksiyon sönümlemesi ve çerçeve esnekliği de özellikle motosikletlerde bunu etkileyebilir.
Bir bisikletin direksiyonu kilitlenirse, sürüş sırasında dengeyi sağlamak neredeyse imkansız hale gelir. Öte yandan, dönen bisiklet tekerleklerinin jiroskopik etkisi, ters dönen tekerlekler eklenerek iptal edilirse, sürüş sırasında dengeyi sağlamak yine de kolaydır.
İleri gidiş: Sürücü, ön tekerleğin yönünü döndürmek ve böylece eğimi kontrol etmek ve dengeyi korumak için gidonlara tork uygular. Yüksek hızlarda, küçük direksiyon açıları, zemin temas noktalarını yanlamasına hızla hareket ettirir; düşük hızlarda, aynı sonuçları aynı sürede elde etmek için daha büyük direksiyon açıları gerekir. Bu nedenle, yüksek hızlarda dengeyi korumak genellikle daha kolaydır. Kendi kendine denge tipik olarak belirli bir eşiğin üzerindeki hızlarda meydana geldiğinden, daha hızlı gitmek, bir bisikletin kendi dengesine katkıda bulunma şansını artırır.
Kütle merkezi konumu
Bisikletin ve sürücünün bileşik kütle merkezi ne kadar ileri (ön tekerleğe daha yakın) olursa, dengeyi korumak için ön tekerleğin yanal olarak o kadar az hareket etmesi gerekir. Tersine, kütle merkezi ne kadar geride (arka tekerleğe daha yakın) olursa, dengeyi yeniden kazanmak için o kadar fazla ön tekerlek yanal hareketi veya bisiklet ileri hareketi gerekir. Ayrıca arka tekerleğin üzerinde ve hatta arkasında ağır bir donanım yükü taşıyan tur bisikletleri için de zor olabilir. Arka tekerlek üzerindeki kütle, ön tekerlek üzerindeki kütleden daha düşükse daha kolay kontrol edilebilir.
Bisiklet de ters sarkaç örneğidir. Tıpkı bir süpürgenin elde bir kalemden daha kolay dengelenmesi gibi, Uzun bir bisikletin (kütle merkezi yüksek olan) bir bisiklete binildiğinde dengelenmesi alçak olana göre daha kolay olabilir çünkü uzun bisikletin yatış hızı daha yavaş olacaktır. Çok ağır bir bisiklet, örneğin trafikte durduğunda dik durmak için, aynı boyda ancak daha düşük kütle merkezi olan bir bisikletten daha fazla çaba gerektirebilir. Bu nedenle, tur bisikletçilerine yükleri bir bisikletle alçakta taşımaları tavsiye edilir ve yan çantalar ön ve arka rafların her iki yanına asılır.
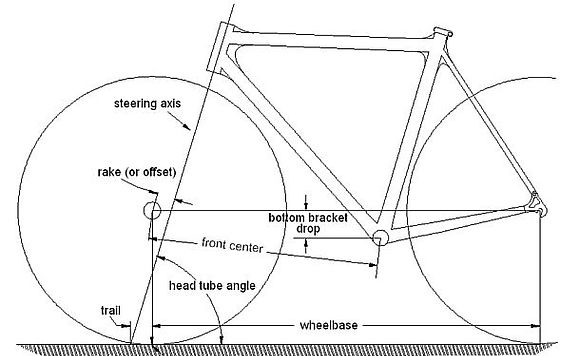
Bisiklet direksiyon ekseni açısı, çatal ofseti ve iz
Bir bisiklete binmenin ne kadar kolay veya zor olacağını etkileyen bir faktör, ön tekerlek zemin temas noktasının direksiyon ekseni zemin temas noktasının arkasından geçtiği mesafedir. Direksiyon ekseni, tüm direksiyon mekanizmasının (çatal, gidon, ön tekerlek vb.) etrafında döndüğü eksendir. Direksiyon ekseni açısı, dikey eksenden ölçüldüğünde kaster açısı veya yatay eksenden ölçüldüğünde baş açısı olarak adlandırılır .
İz ( trail ) , baş açısı ( steering axis) , çatal ofseti ( rake ) veya eğimi ve tekerlek boyutunun bir fonksiyonudur. Aralarındaki ilişki şu formülle tanımlanabilir.
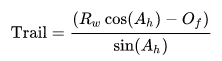
burada Rw tekerlek yarıçapı, A h yataydan saat yönünde ölçülen baş açısıdır ve O f çatal ofseti veya tırmıktır. Tekerlek boyutunu artırarak, baş açısını azaltarak veya çatal eğimini azaltarak iz artırılabilir.
Geleneksel bir bisiklet ne kadar çok iz bırakırsa, o kadar dengeli hisseder, ancak manevra kabiliyeti azalır. Normalde, yol yarışı bisikletleri, tur bisikletlerinden daha fazla ama dağ bisikletlerinden daha az ize sahiptir. Dağ bisikletleri, yol bisikletlerinden daha az dikey kafa açılarıyla tasarlanmıştır, böylece daha fazla iz ve dolayısıyla inişler için daha iyi denge sağlanır. Tur bisikletleri, binicinin bagajla ağırlaştırılmış bir bisikleti kontrol etmesine izin vermek için küçük bir iz ile imal edilmiştir.
72° ile 73° arasında kafa açısı ve iz genişliği 43 mm ile 60 mm olan tur bisikletleri
73° ile 74° kafa açısı arasında ve iz genişliği 28 mm ile 45 mm arasında olan yarış bisikletleri
75 ° kafa açıları ve iz genişliği 23,5 mm ile 37 mm arasında olan dağ bisikletleri
Bunlar genelleme olmakla beraber farlı üretimler de olabilir: Örneğin, LeMond Racing Cycles
Mekanik iz, normal iz veya gerçek iz olarak adlandırılan ize benzer bir ölçüm, direksiyon ekseninden ön tekerlek temas yamasının merkezine olan dik mesafedir.
Bir bisikletin yön dengesini etkileyen bir faktör, ön ve arka tekerleklerin zemin temas noktaları arasındaki yatay mesafe olan dingil mesafesidir. Ön tekerleğin bir miktar dış etkiler nedeniyle farkın açısı, dingil mesafesi ile ters orantılıdır. Ayrıca, belirli bir dönüş açısı ve yatış açısı için dönüş yarıçapı, dingil mesafesi ile orantılıdır. Son olarak, bisiklet yatırıldığında ve yönlendirildiğinde dingil mesafesi artar. Uç noktada, yatış açısı 90° olduğunda ve bisiklet o eğim yönünde yönlendirildiğinde, dingil mesafesi ön ve arka tekerleklerin yarıçapı kadar artar.
Direksiyon mekanizması kütle dağılımı
Geleneksel bisiklet tasarımlarının, ön tekerleği, çatalı ve gidonu içeren direksiyon mekanizmasındaki kütle merkezi direksiyon ekseninin önündeyse, yerçekimi ayrıca ön tekerleğin yana yatış yönünde dönmesine neden olacaktır. Bu, sabit bir bisikleti bir tarafa yaslayarak görülebilir. Kütle merkezinin önden arkaya konumu ve kütle merkezinin yüksekliği gibi ek parametreler de bisikletin dinamik davranışına katkıda bulunur
Çoğu bisiklet tasarımında jiroskopik etkinin rolü, ön tekerleği eğim yönüne yönlendirmeye yardımcı olmaktır. Bu fenomene presesyon denir ve bir nesnenin ilerleme hızı, dönme hızıyla ters orantılıdır. Ön tekerlek ne kadar yavaş dönerse, bisiklet eğildiğinde o kadar hızlı ilerler ve bunun tersi de geçerlidir. Lastiklerin zemine sürtünmesi ile ön tekerlek gibi arka tekerleğin de patinaj yapması engellenir ve böylece hiç patinaj yapmıyormuş gibi eğilmeye devam eder. Dolayısıyla jiroskopik kuvvetler devrilmeye karşı herhangi bir direnç sağlamaz.
Jiroskopik etkilerin bir başka katkısı, karşı direksiyon sırasında ön tekerlek tarafından oluşturulan bir yuvarlanma momentidir. Örneğin, sola dönüş, sağa doğru bir moment oluşmasına neden olur. Moment, takip eden ön tekerlek tarafından oluşturulana kıyasla küçüktür, ancak sürücü gidonlara tork uyguladığı anda başlar ve bu nedenle motosiklet yarışlarında yardımcı olabilir.
Kendi kendine stabilite
Dengeye katkıda bulunan tüm faktörlerden (yol, kütle dağılımı, jiroskopik etkiler, vb.) etkilenen iki kararsız rejim arasında, belirli bir bisiklet tasarımı için belirli bir hızda bir dizi ileri hız olabilir. bu etkiler kontrolsüz bir bisikleti dik olarak yönlendirir.
Ne jiroskopik etkilerin ne de pozitif izlerin tek başına yeterli olmadığı veya kendi kendine stabilite için gerekli olmadığı, -ancak eller serbest kontrolü kesinlikle geliştirebilseler de- kanıtlanmıştır.
Boyuna ivmenin yanal dinamikler üzerinde büyük ve karmaşık bir etkiye sahip olduğu gösterilmiştir. Bir çalışmada, pozitif hızlanma öz kararlılığı ortadan kaldırır ve negatif hızlanma (yavaşlama) öz kararlılık hızlarını değiştirir.
Bir bisikletin dönmesi, yani ileri hareket yönünü değiştirmesi için, ön tekerlek, herhangi bir ön tekerlekten yönlendirilen araçta olduğu gibi, yaklaşık olarak istenen yöne bakmalıdır. Tekerlekler ve zemin arasındaki sürtünme, viraj alma kuvveti ve kamber itişinin bir kombinasyonu olarak rotayı dümdüzden değiştirmek için gerekli merkezcil ivmeyi üretir. Dik (eğik olmayan) bir bisikletin dönüş yarıçapı, küçük direksiyon açıları için kabaca şu şekilde tahmin edilebilir:
r = w / δ cos ( ϕ )
burada r yaklaşık yarıçaptır, w dingil mesafesi, δ dönüş açısıdır ve ϕ direksiyon ekseninin kaster açısıdır
Yan yatma
Bisikletler de ilgili kuvvetleri dengelemek için bir dönüş sırasında eğilmelidir: yerçekimi, atalet, sürtünme ve yer desteği. Yatma açısı, θ, ideal durumda dairesel hareket yasaları kullanılarak kolayca hesaplanabilir:
θ = arctan ( v^2 /g * r )
v ileri hız, r dönüşün yarıçapı ve g yerçekimi ivmesidir.[48]
Aynı ileri hız ve dönüş yarıçapında modern lastiklerin genişliğini telafi etmek için motosikletlerde yatış açısında hafif bir artış gerekebilir.
Bisikletin bu eğimi, dönüşün gerçek yarıçapını, yatış açısının kosinüsüyle orantılı olarak azaltır. Ortaya çıkan yarıçap kabaca şu şekilde tahmin edilebilir (tam değerin %2’si dahilinde):
r = w cos ( θ ) / δ cos ( ϕ )
burada r yaklaşık yarıçaptır, w dingil mesafesi, θ yatma açıdır, δ direksiyon açısıdır ve ϕ direksiyon ekseninin kaster açısıdır.
Lastiklerin sınırlı genişliği, arka çerçevenin gerçek yatış açısını yukarıda açıklanan ideal yatış açısından değiştirir. Çerçeve ile düşey arasındaki gerçek yatış açısı, lastik genişliği ile artmalı ve kütle merkezi yüksekliği ile azalmalıdır. Şişman lastikli ve düşük kütle merkezli bisikletler, aynı dönüşü aynı hızda yapmak için daha ince lastikli veya daha yüksek kütle merkezlerine sahip bisikletlerden daha fazla eğilmelidir. 2t’lik bir lastik kalınlığı nedeniyle yana yatma açısındaki artış şu şekilde hesaplanabilir:
arcsin ( t * ( sin ( φ ) / ( h – t )
burada φ ideal eğim açısıdır ve h kütle merkezinin yüksekliğidir
Örneğin, 12 inç genişliğinde arka lastiği olan bir motosiklette t = 6 inç olacaktır. Kombine bisiklet ve binici kütle merkezi 26 inç yükseklikteyse, 25° eğim 7.28° artırılmalıdır: yaklaşık %30 artış. Lastikler yalnızca 6 inç genişliğindeyse, yana yatış açısı artışı yalnızca 3,16°, yani yarının hemen altında.
Kontra manevra
Kontra manevra Ana madde: Karşı Yönlendirme Bir dönüşü başlatmak ve o dönüş yönünde gerekli eğilmeyi başlatmak için, bir bisikletin anlık olarak ters yöne dönmesi gerekir. Bu genellikle karşı yönlendirme olarak adlandırılır. Ön tekerlek artık hareket yönüne sonlu bir açıdayken, lastiğin temas alanında yanal bir kuvvet geliştirilir. Bu kuvvet, bisikletin uzunlamasına (yuvarlanma) ekseni etrafında bir tork oluşturur ve bu tork, bisikletin başlangıçta yönlendirilen yönden uzağa ve istenen dönüş yönüne doğru eğilmesine neden olur. Bisikleti yana yatırmak için gerekli kuvveti yaratmak için uygun bir yan rüzgar gibi herhangi bir dış etkinin olmadığı durumlarda, hızlı bir dönüşü başlatmak için karşı direksiyon gereklidir
Direksiyon açısı Sabit durumdaki dönüşü sürdürmek için gerekli olan ön düzeneğin direksiyon ekseni etrafında döndüğü açı olan açıyı çeşitli etkiler etkiler. Bunlardan bazıları tek hatlı araçlara özgüyken, diğerleri otomobillerde de yaşanmaktadır. Bunlardan bazıları bu makalenin başka bir yerinde bahsedilebilir ve tek bir yerde bulunabilmeleri için mutlaka önem sırasına göre olmasa da burada tekrarlanmıştır. İlk olarak, gerçek kinematik direksiyon açısı, ön düzeneğin döndürüldüğü yol düzlemine yansıtılan açı, direksiyon açısının ve direksiyon ekseni açısının bir fonksiyonudur:
Δ = δ cos ( φ )
burada Δ kinematik direksiyon açısıdır, δ direksiyon açısıdır ve ϕ direksiyon ekseninin kaster açısıdır.
İkincisi, bisikletin eğimi, dönüşün gerçek yarıçapını, yatış açısının kosinüsüyle orantılı olarak azaltır. Ortaya çıkan yarıçap kabaca şu şekilde tahmin edilebilir (tam değerin %2’si dahilinde):
r = w cos ( θ ) / δ cos ( φ )
burada r yaklaşık yarıçaptır, dingil mesafesi, θ yalın açıdır, δ direksiyon açısıdır ve φ direksiyon ekseninin kaster açısıdır.
Üçüncüsü, ağırlık dağılımı, lastik özellikleri vb. nedeniyle ön ve arka lastikler farklı kayma açılarına sahip olabileceğinden, bisikletlerde arkadan savrulma veya aşırı savrulma olabilir. Önden savrulma sırasında, açı daha büyük olmalıdır ve aşırı savrulma sırasında, belirli bir dönüş yarıçapını korumak için kayma açılarının eşit olması durumunda olacağından daha az direksiyon açısı olmalıdır. Bazı yazarlar, önemli arka tekerlek kaymasına tepki olarak kontrolü sürdürmek için bazı koşullar altında bazı bisikletlerin dönüşün ters yönüne (negatif direksiyon açısı) yönlendirme ihtiyacını belirtmek için karşı direksiyon terimini bile kullanırlar.
Dördüncüsü, kamber itişi, bisikletin düz bir yoldan sapmasına neden olmak için gerekli merkezcil kuvvete ve kayma açısı nedeniyle viraj alma kuvvetine katkıda bulunur ve en büyük katkıyı sağlayabilir. Kamber itişi, bisikletlerin otomobillerle aynı yarıçapta ancak daha küçük bir direksiyon açısıyla dönüş yapma yeteneğine katkıda bulunur. Bir bisiklet aynı yönde yönlendirilip yatırıldığında, ön lastiğin kamber açısı arka lastiğinkinden daha büyüktür ve bu nedenle, diğer her şey eşit olmak üzere daha fazla kamber itişi üretebilir.
Elleri bırakarak sürüş
Karşı direksiyon genellikle gidonlara doğrudan tork uygulanarak başlatılırken, bisiklet gibi daha hafif araçlarda bu, sürücünün ağırlığını değiştirerek de gerçekleştirilebilir. Sürücü bisiklete göre sağa doğru eğilirse, bisiklet açısal momentumu korumak için sola doğru eğilir ve birleşik kütle merkezi hemen hemen aynı dikey düzlemde kalır. Bisikletin bazı yazarlar tarafından karşı yatış olarak adlandırılan bu sola eğimi, sanki sürücü doğrudan gidonlara bir tork uygulayarak sola ters yönde dönmüş gibi, sola dönmesine ve sağa dönüş başlatmasına neden olacaktır.
Jiroskopik etkiler
Denge ile ilgili bölümde yukarıda bahsedildiği gibi, ön tekerleği döndürmenin bir etkisi, jiroskopik presesyonun neden olduğu bir yuvarlanma momentidir. Bu momentin büyüklüğü, ön tekerleğin atalet momenti, dönüş hızı (ileri hareket), sürücünün gidonlara bir tork uygulayarak ön tekerleği döndürme hızı ve ön tekerleğin arasındaki açının kosinüsü ile orantılıdır. direksiyon ekseni ve dikey.
Eylemsizlik momenti 0,6 kg m2 olan bir ön tekerleği olan 22 m/s (50 mph) hızla hareket eden örnek bir motosiklet için, ön tekerleği yarım saniyede bir derece döndürmek 3.5 Nm’lik bir yuvarlanma momenti üretir. Karşılaştırıldığında, motosikletin altından dışarı çıkarken ön lastik üzerindeki yanal kuvvet maksimum 50 N’ye ulaşır. Bu, kütle merkezinin 0,6 m (2 ft) yüksekliğine etki ederek 30 N’luk bir yuvarlanma momenti oluşturur.
Jiroskopik kuvvetlerden kaynaklanan moment bunun sadece %12’si olsa da, önemli bir rol oynayabilir, çünkü tekerlek raydan çıktıkça daha yavaş birikmek yerine, sürücü torku uyguladığı anda hareket etmeye başlar.
İki tekerlekten direksiyon
Düşük hızda daha dar dönüş yarıçapı gibi teorik faydalar nedeniyle, iki tekerlekli direksiyonlu motosikletler yapmak için girişimlerde bulunulmuştur. Avustralya’da Ian Drysdale tarafından çalışan bir prototipin “çok iyi çalıştığı” bildiriliyor.] Tasarımdaki sorunlar arasında arka tekerleğin aktif kontrolünün sağlanıp sağlanmayacağı veya serbestçe sallanmasına izin verilip verilmeyeceği yer alıyor. Aktif kontrol durumunda, kontrol algoritmasının ön tekerlekle veya ön tekerleğin ters yönüne, ne zaman ve ne kadar yönlendirme arasında karar vermesi gerekir. İki tekerlekten direksiyonun bir uygulaması olan Sideways_bike bisikleti, sürücünün her iki tekerleğin direksiyonunu doğrudan kontrol etmesini sağlar. Bir diğeri, Swing Bike, gidon tarafından da kontrol edilebilmesi için koltuğun önünde ikinci direksiyon eksenine sahipti.
https://en.wikipedia.org/wiki/Sideways_bike

https://www.odd-bike.com/2019/07/guest-post-robert-horns-rohorn-two.html
Milton W. Raymond, iki tekerleği bağımsız olarak kontrol etmek için çeşitli direksiyon mekanizmalarına sahip “X-2” adı verilen uzun, alçak, iki tekerlekli direksiyonlu bir bisiklet yaptı. Direksiyon hareketleri arasında, lastik temas noktalarını kütle merkezinin altına yönlendirmek için her iki tekerleğin birlikte hareket ettiği “denge”; ve tekerleklerin eşit olarak zıt yönlerde döndüğü ve böylece kütle merkezine göre lastik temaslarının yanal konumunu önemli ölçüde değiştirmeden bisikleti yönlendirdiği “gerçek daire”. X-2 ayrıca, örneğin ön tekerlek karayolu merkez hattına yakın ve arka tekerlek kaldırıma yakınken, tekerlekler paralel ancak çerçeve ile aynı hizada değilken “yengeç yönünde” gidebildi. “Dengeli” direksiyon, uzun dingil mesafesine ve düşük kütle merkezine rağmen kolay dengelemeye izin verdi, ancak kendi kendini dengeleyen (“elsiz”) bir konfigürasyon keşfedilmedi. Beklendiği gibi gerçek daireyi dengelemek esasen imkansızdı, çünkü direksiyon, lastik yamasının ve kütle merkezinin yanlış hizalanmasını düzeltmez. Yaklaşık 45°’ye kadar test edilen açılarda yengeç dönüşü, frenleme sırasında bile düşme eğilimi göstermedi. X-2, bkz. Whitt ve Wilson’s Bicycling Science 2. Baskı.
Arka tekerlekten direksiyon
Teorik faydalar, özellikle basitleştirilmiş bir önden çekiş mekanizması nedeniyle, sürülebilir bir arkadan direksiyonlu bisiklet yapmak için girişimlerde bulunulmuştur. Bendix Şirketi arkadan direksiyonlu bir bisiklet yaptı ve ABD Ulaştırma Bakanlığı, arkadan direksiyonlu bir motosikletin yapımını görevlendirdi: Alton, Illinois’deki Rainbow Trainers, Inc., “arkadan yönlendirilen bisikleti, Arkadan Yönlendirilen Bisiklet I’i başarıyla sürebilen” ilk kişiye 5.000 ABD Doları teklif etti. Arka tekerlekten direksiyonlu bir bisikleti başarıyla kullanan birinin belgelenmiş bir örneği, özel olarak tasarlanmış yatık bir bisikletle Massachusetts Teknoloji Enstitüsü’nden L. H. Laiterman’ınkidir. Bu, kaçınılmaz oldukları anlamına gelmez, ancak onları kontrol etme çabasının daha yüksek olduğu anlamına gelir. Ancak, bu sorundan etkilenmeyen amaca yönelik başka tasarımlar yayınlanmıştır.
Ortadan direksiyon
Klasik önden direksiyonlu bisikletler ile kesinlikle arkadan direksiyonlu bisikletlerin uç noktaları arasında, ikisi arasında bir yerde bir pivot noktasına sahip, merkezden direksiyon olarak adlandırılan ve mafsallı direksiyona benzer bir bisiklet sınıfı bulunur. Konseptin erken bir uygulaması, 1870’lerin başındaki Phantom bisikletiydi ve penny-farthing’e daha güvenli bir alternatif olarak tanıtıldı. Bu tasarım, basit önden çekişe izin verir ve birçok fotoğrafın gösterdiği gibi, mevcut uygulamalar oldukça kararlı, hatta eller olmadan bile sürülebilir görünmektedir.

Bir yaslanmış olan Python Lowracer gibi bu tasarımlar genellikle çok gevşek kafa açılarına (40° ila 65°) ve pozitif ve hatta negatif izlere sahiptir. Negatif izli bir bisiklet üreticisi, bisikleti dümdüz ileri götürmenin koltuğu (ve dolayısıyla biniciyi) hafifçe yükselmeye zorladığını ve bu durumun olumsuz yolun dengesizleştirici etkisini dengelediğini belirtir.
Ters direksiyon
Bisikletler, inceleme ve gösterim amacıyla, direksiyon ters çevrilerek yapılmıştır, böylece gidonları sola çevirmek ön tekerleğin sağa dönmesine neden olur ve bunun tersi de geçerlidir. Böyle bir bisiklete binmek mümkündür, ancak normal bisikletleri olan deneyimli binicilerin, eğer başarabilirlerse, öğrenmeyi çok zor buldukları bulunmuştur.