

This scooter is built with existing scooter parts, but has a different setup. The handlebar commands the rear wheel only.
It handles corners much better than a conventional front wheel steering bike, and also people who can manage to ride standard one, can ride this one easily. This can be build with better components, rear wheel caster angle and offset can be arranged, front axle geometry and firmness of suspension can be better fine tuned, but even as it is, it works quite fine.
For example, to turn left :
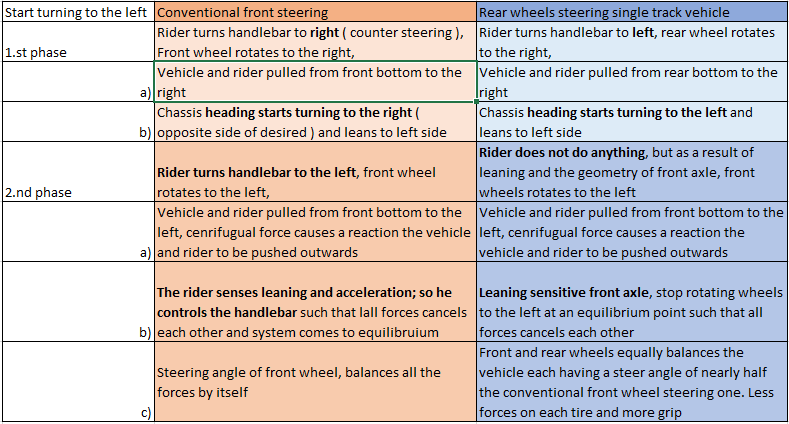
Since this system is an inverted pendulum, it has a period time, the rotation of a rear wheel causes rotation of the front wheels, not online, but with a small time latency of less than one second. But this small time lag enables the system working
Single track vehicles requires counter steering to start a turn and also to end a turn but most of us do it unconsciously. Many people does not notices but it is a must to ride a bike.
https://en.wikipedia.org/wiki/Countersteering
To make an analogy, the front wheel of this new vehiclefunctions the same as a child’s 3-wheel non-electric scooter, or similar to a skateboard/long-board axle, but the rear wheel steering is similar to motorboats that lean into turn while turning.. A conventional single hull boat leans in to the turn because the rudder/prop/jet exerts a sideways force onto the water below the center of mass of the boat, coexistent with the water applying an equal and opposing force, causing the boat to lean inwards.

This new self-balancing scooter can be utilised for scooter sharing rental companies with human tele-operators or autonomous ride if possible:
- when scooters park their vehicles on the pavement, can move a convenient place
- If scooter parked to a place that no demands in that area so the scooter is “ghost scooter”, can move to a more possible demand zone
- When a request from a client but nearest scooter is a few hundred meters to the client, vehicle can go and meet the client
- When battery low, it can move to nearest charging point
When moving with a rider, the vehicle moves 1 wheel back and two wheels ahead ( tadpole), but with human tele-operators or autonomous driving it is possible to move the vehicle in both directions: Delta or tadpole both are possible as needed. Electric motors can move in both directions without modification.
How to ride this new vehicle
Although it’s very easy and you basically do nothing, just chill, it’s a bit awkward at first for people who are used to cycling and have never ridden skateboards or long-boards. Because cornering is handled in two stages (first rear wheel and front wheel rotation comes in a second but does not come online, the apprentice rider will try to react unconsciously at first and correct the rear wheel tilt, but the front wheel will do the same automatically,then the rider tries to correct with doing opposite and the same is done by the front wheels. So it is possible for the system to resonate at first and fluctuate constantly. It may take 10 or 15 minutes to learn to drive.
When I teach, I advise the new rider to “do nothing”, imagine you are behind a trusted biker, just follow him, lean same side with him, don’t try to fix anything and the system will do everything for you. Once the new driver has confidence in the system, he can start driving this vehicle effectively.
Where else can this principle “rear wheel steering vehicles lean inward on turns” be used?
To help improve the cornering ability of 3 wheelers tilting and non-tilting vehicles, it may be possible to use rear wheel steering as well.
It is possible to build a 2 wheels single track robotic vehicle with 2 wheels steering remote controlled or autonomous drive such that they do not need counter-steering but cornering better than a conventional front wheel steering bike.
This system also enables to build a hands-free bike.
