
The development of e-scooters is a decisive step towards long-term sustainability. Electric scooters are described as the future of urban mobility. They are environmentally friendly, noiseless, and pollution-free.
I have read about and seen videos about some self-balancing bikes; they were using gyroscopic spinning reels, and I haven’t heard about neither widespread usage nor a market success at all.
Gyroscopic spinning reels helps to balance at slow speeds, but it is very dependent on the load (rider, passenger, cargo) and consumes too much energy compared to a human ride bike which uses steering.
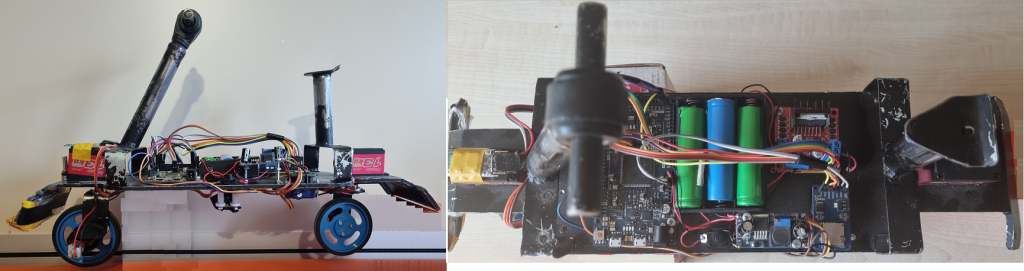
I have designed and produced a self balancing scooter mock-up model without a spinning reel, only using steering commands like a human ride single-track vehicle.
See the videos below:
Single-track vehicles usually have little or no lateral stability when stationary (e.g. for parking). To overcome this, e-scooter dynamics, and Segway (ginger/hoverboard) dynamics can be merged in one single vehicle.
In Which Application Areas Can It Be Benefited?
Scooter sharing in cities
Cities really hate it when scooters parked on the sideways and block pedestrians or wheel chairs. An autonomous bike is a self-balancing bike that helps the bike navigate its journey by performing appropriate actions based on parameters detected by sensors.
So to prevent problems caused by driving or parking in the wrong place in the city (sidewalk, bus stop, school, hospital, in front of the fire station), in the wrong way, at the wrong time (roads may be opened or closed depending on the time). In some cases, people at a tele-operations center would guide scooters through streets and sidewalks.
Autonomous electric bikes and scooters can navigate to charging points like a home robot vacuum cleaner. Currently, both tasks require trucks and vans to collect and deliver electric bikes and scooters. Autonomous driving will eliminate this requirement, reducing labor, fuel costs and emissions.
To go autonomous or remote controlled, e-scooters must be laterally stabilized first.
Self-driving bicycle in the cities
The self-driving bicycle enables safe navigation through the city for Amsterdam residents and furthers Google’s ambition to improve urban mobility with technology.
Tilting e-trikes – ultra narrow tilting vehicles
Are tilting e-trikes catching on?
There are some ultra narrow vehicles offered into market recently; these vehicles can help transportation with more energy saving. Such vehicles, despite having a narrow axle path, can corner without rolling over.
An active controller can calculate the desired lean angle from a combination of lateral acceleration and steering input and set the desired lean angle with some combination of mechanical, electrical, or hydraulic actuators.
However, here the tilting is achieved by applying pressure on left or right suspension as needed and this makes the rider and ( passenger if exists ) feel like he is riding on a roller-coaster. On normal bicycle, moto-bike riding side lateral acceleration does not exists or very negligible. Better to lean like a single-track vehicle as in out mock-up model
Single-track vehicles with a roof – cabin bikes
A bicycle with a cabin protects you from the weather, but since this cabin is closed and the rider cannot place her feet freely on the ground, this vehicle must first be stabilized laterally, which our model can do it well.
People who can not ride a bike
4 in 10 adults lack crucial skill for riding a ike: This can be because never tried to learn when younger, or because of a disease people use muscles normally but physical motor skills not enough for balancing a bike.
People lack crucial skill for riding a bike
In this video a great visual show performance feast has not been offered because:
This small mock-up model has small motors that are slow, so this model doesn’t lean too much (but don’t think not leaning at all – a single-track vehicle can never go around corners without leaning).
Vehicle steering forks are not rigid enough for fast cornering.
Simple tires almost has no grip on ceramic floors.
Speed is not always constant due to servo motors cause fluctuations on voltage.
Upright stabilization of the bicycle is like an inverted pendulum, the period of the pendulum is proportional to the square root of the height, so such a model is more difficult to stabilize than a full-size model. Also, low speed makes balance difficult (remember cycling)
However, this small mock-up model proves the concept: it works fine and with a better quality components, much better can be achieved using the same software.
To learn more about the project, please visit micro website :